made an update to solve the big error. update raspbee.coffee
In the debug log you can see the message send to the shutter device
The relevant debug lines contain '…@_sendState … ’
-
Release pimatic-raspbee@0.1.6
-
yes error message disappeard, but I’m not sure what I might search for in the log.
As an example, I pressed the ‘open’ button in the gui and `below is the result:
As said, after reaching 100% open, the device is switched to ‘close’.
Is the mistake evtl. in line:
22:45:51.072 [pimatic-raspbee] debug:> “lift”: 50
where it might should have been “stop”?22:45:45.971 [pimatic-raspbee] debug: ChangeStateTo open 22:45:45.981 [pimatic-raspbee] debug: moveTo: 0, target: 100, _transitSeconds: 5, _positionStep: 20 22:45:45.984 [pimatic-raspbee] debug: updatePosition: 40 22:45:45.987 [pimatic-raspbee] debug: changeActionTo, @_sendState: { 22:45:45.987 [pimatic-raspbee] debug:> "lift": 0 22:45:45.987 [pimatic-raspbee] debug:>} 22:45:46.012 [pimatic-raspbee] debug: Position: 20 22:45:46.077 [pimatic-raspbee] debug: New value send to device WindowCov01 22:45:46.083 [pimatic-raspbee] debug: { lift: 0 } 22:45:46.090 [pimatic-raspbee] debug: new message received 22:45:46.095 [pimatic-raspbee] debug: { e: 'changed', 22:45:46.095 [pimatic-raspbee] debug:> id: '3', 22:45:46.095 [pimatic-raspbee] debug:> r: 'lights', 22:45:46.095 [pimatic-raspbee] debug:> state: 22:45:46.095 [pimatic-raspbee] debug:> { bri: 254, lift: 100, on: true, open: false, reachable: true }, 22:45:46.095 [pimatic-raspbee] debug:> t: 'event', 22:45:46.095 [pimatic-raspbee] debug:> uniqueid: 'ec:1b:bd:ff:fe:8f:10:92-01' } 22:45:46.098 [pimatic-raspbee] debug: Received values: { 22:45:46.098 [pimatic-raspbee] debug:> "id": 3, 22:45:46.098 [pimatic-raspbee] debug:> "type": "event", 22:45:46.098 [pimatic-raspbee] debug:> "event": "changed", 22:45:46.098 [pimatic-raspbee] debug:> "resource": "lights", 22:45:46.098 [pimatic-raspbee] debug:> "state": { 22:45:46.098 [pimatic-raspbee] debug:> "bri": 254, 22:45:46.098 [pimatic-raspbee] debug:> "lift": 100, 22:45:46.098 [pimatic-raspbee] debug:> "on": true, 22:45:46.098 [pimatic-raspbee] debug:> "open": false, 22:45:46.098 [pimatic-raspbee] debug:> "reachable": true 22:45:46.098 [pimatic-raspbee] debug:> }, 22:45:46.098 [pimatic-raspbee] debug:> "uniqueid": "ec:1b:bd:ff:fe:8f:10:92-01" 22:45:46.098 [pimatic-raspbee] debug:>} 22:45:47.020 [pimatic-raspbee] debug: updatePosition: 60 22:45:47.026 [pimatic-raspbee] debug: Position: 40 22:45:48.034 [pimatic-raspbee] debug: updatePosition: 80 22:45:48.040 [pimatic-raspbee] debug: Position: 60 22:45:49.050 [pimatic-raspbee] debug: updatePosition: 100 22:45:49.056 [pimatic-raspbee] debug: Position: 80 22:45:50.064 [pimatic-raspbee] debug: updatePosition: 120 22:45:50.068 [pimatic-raspbee] debug: Position: 100 22:45:50.348 [pimatic-raspbee] debug: new message received 22:45:50.354 [pimatic-raspbee] debug: { attr: 22:45:50.354 [pimatic-raspbee] debug:> { id: '1', 22:45:50.354 [pimatic-raspbee] debug:> lastannounced: null, 22:45:50.354 [pimatic-raspbee] debug:> lastseen: '2021-02-16T21:45Z', 22:45:50.354 [pimatic-raspbee] debug:> manufacturername: 'dresden elektronik', 22:45:50.354 [pimatic-raspbee] debug:> modelid: 'ConBee II', 22:45:50.354 [pimatic-raspbee] debug:> name: 'Configuration tool 1', 22:45:50.354 [pimatic-raspbee] debug:> swversion: null, 22:45:50.354 [pimatic-raspbee] debug:> type: 'Configuration tool', 22:45:50.354 [pimatic-raspbee] debug:> uniqueid: '00:21:2e:ff:ff:06:15:e6-01' }, 22:45:50.354 [pimatic-raspbee] debug:> e: 'changed', 22:45:50.354 [pimatic-raspbee] debug:> id: '1', 22:45:50.354 [pimatic-raspbee] debug:> r: 'lights', 22:45:50.354 [pimatic-raspbee] debug:> t: 'event', 22:45:50.354 [pimatic-raspbee] debug:> uniqueid: '00:21:2e:ff:ff:06:15:e6-01' } 22:45:51.072 [pimatic-raspbee] debug: stopCover, @_sendState: { 22:45:51.072 [pimatic-raspbee] debug:> "lift": 50 22:45:51.072 [pimatic-raspbee] debug:>} 22:45:51.102 [pimatic-raspbee] debug: New value send to device WindowCov01 22:45:51.106 [pimatic-raspbee] debug: { lift: 50 } 22:45:51.127 [pimatic-raspbee] debug: new message received 22:45:51.131 [pimatic-raspbee] debug: { e: 'changed', 22:45:51.131 [pimatic-raspbee] debug:> id: '3', 22:45:51.131 [pimatic-raspbee] debug:> r: 'lights', 22:45:51.131 [pimatic-raspbee] debug:> state: { bri: 0, lift: 0, on: false, open: true, reachable: true }, 22:45:51.131 [pimatic-raspbee] debug:> t: 'event', 22:45:51.131 [pimatic-raspbee] debug:> uniqueid: 'ec:1b:bd:ff:fe:8f:10:92-01' } 22:45:51.133 [pimatic-raspbee] debug: Received values: { 22:45:51.133 [pimatic-raspbee] debug:> "id": 3, 22:45:51.133 [pimatic-raspbee] debug:> "type": "event", 22:45:51.133 [pimatic-raspbee] debug:> "event": "changed", 22:45:51.133 [pimatic-raspbee] debug:> "resource": "lights", 22:45:51.133 [pimatic-raspbee] debug:> "state": { 22:45:51.133 [pimatic-raspbee] debug:> "bri": 0, 22:45:51.133 [pimatic-raspbee] debug:> "lift": 0, 22:45:51.133 [pimatic-raspbee] debug:> "on": false, 22:45:51.133 [pimatic-raspbee] debug:> "open": true, 22:45:51.133 [pimatic-raspbee] debug:> "reachable": true 22:45:51.133 [pimatic-raspbee] debug:> }, 22:45:51.133 [pimatic-raspbee] debug:> "uniqueid": "ec:1b:bd:ff:fe:8f:10:92-01" 22:45:51.133 [pimatic-raspbee] debug:>} `` -
The basic test would be starting with the slider to 0%
The following Gui actions
Test 1- push open
- wait to complete position from 0% to 100%
- the stop button should become blue, and position 100%
Test 2 (starting in the endstate from test 1)
- push close
- wait to complete position from 100% to 0%
- the stop button should become blue, and position 0%
Post the debug lines starting with ‘[pimatic-raspbee] debug: ChangeStateTo open’
-
ok, in the gui everything worked as described by you.
Here the log:2:57:49.273 [pimatic-raspbee] debug: ChangeStateTo open 22:57:49.282 [pimatic-raspbee] debug: moveTo: 0, target: 100, _transitSeconds: 5, _positionStep: 20 22:57:49.284 [pimatic-raspbee] debug: updatePosition: 40 22:57:49.285 [pimatic-raspbee] debug: changeActionTo, @_sendState: { 22:57:49.285 [pimatic-raspbee] debug:> "lift": 0 22:57:49.285 [pimatic-raspbee] debug:>} 22:57:49.297 [pimatic-raspbee] debug: Position: 20 22:57:49.325 [pimatic-raspbee] debug: New value send to device WindowCov01 22:57:49.328 [pimatic-raspbee] debug: { lift: 0 } 22:57:49.346 [pimatic-raspbee] debug: new message received 22:57:49.351 [pimatic-raspbee] debug: { e: 'changed', 22:57:49.351 [pimatic-raspbee] debug:> id: '3', 22:57:49.351 [pimatic-raspbee] debug:> r: 'lights', 22:57:49.351 [pimatic-raspbee] debug:> state: 22:57:49.351 [pimatic-raspbee] debug:> { bri: 254, lift: 100, on: true, open: false, reachable: true }, 22:57:49.351 [pimatic-raspbee] debug:> t: 'event', 22:57:49.351 [pimatic-raspbee] debug:> uniqueid: 'ec:1b:bd:ff:fe:8f:10:92-01' } 22:57:49.353 [pimatic-raspbee] debug: Received values: { 22:57:49.353 [pimatic-raspbee] debug:> "id": 3, 22:57:49.353 [pimatic-raspbee] debug:> "type": "event", 22:57:49.353 [pimatic-raspbee] debug:> "event": "changed", 22:57:49.353 [pimatic-raspbee] debug:> "resource": "lights", 22:57:49.353 [pimatic-raspbee] debug:> "state": { 22:57:49.353 [pimatic-raspbee] debug:> "bri": 254, 22:57:49.353 [pimatic-raspbee] debug:> "lift": 100, 22:57:49.353 [pimatic-raspbee] debug:> "on": true, 22:57:49.353 [pimatic-raspbee] debug:> "open": false, 22:57:49.353 [pimatic-raspbee] debug:> "reachable": true 22:57:49.353 [pimatic-raspbee] debug:> }, 22:57:49.353 [pimatic-raspbee] debug:> "uniqueid": "ec:1b:bd:ff:fe:8f:10:92-01" 22:57:49.353 [pimatic-raspbee] debug:>} 22:57:50.303 [pimatic-raspbee] debug: updatePosition: 60 22:57:50.317 [pimatic-raspbee] debug: Position: 40 22:57:51.327 [pimatic-raspbee] debug: updatePosition: 80 22:57:51.333 [pimatic-raspbee] debug: Position: 60 22:57:52.341 [pimatic-raspbee] debug: updatePosition: 100 22:57:52.345 [pimatic-raspbee] debug: Position: 80 22:57:53.350 [pimatic-raspbee] debug: updatePosition: 120 22:57:53.354 [pimatic-raspbee] debug: Position: 100 22:57:54.357 [pimatic-raspbee] debug: stopCover, @_sendState: { 22:57:54.357 [pimatic-raspbee] debug:> "lift": 50 22:57:54.357 [pimatic-raspbee] debug:>} 22:57:54.405 [pimatic-raspbee] debug: New value send to device WindowCov01 22:57:54.410 [pimatic-raspbee] debug: { lift: 50 } 22:57:54.429 [pimatic-raspbee] debug: new message received 22:57:54.437 [pimatic-raspbee] debug: { e: 'changed', 22:57:54.437 [pimatic-raspbee] debug:> id: '3', 22:57:54.437 [pimatic-raspbee] debug:> r: 'lights', 22:57:54.437 [pimatic-raspbee] debug:> state: { bri: 0, lift: 0, on: false, open: true, reachable: true }, 22:57:54.437 [pimatic-raspbee] debug:> t: 'event', 22:57:54.437 [pimatic-raspbee] debug:> uniqueid: 'ec:1b:bd:ff:fe:8f:10:92-01' } 22:57:54.440 [pimatic-raspbee] debug: Received values: { 22:57:54.440 [pimatic-raspbee] debug:> "id": 3, 22:57:54.440 [pimatic-raspbee] debug:> "type": "event", 22:57:54.440 [pimatic-raspbee] debug:> "event": "changed", 22:57:54.440 [pimatic-raspbee] debug:> "resource": "lights", 22:57:54.440 [pimatic-raspbee] debug:> "state": { 22:57:54.440 [pimatic-raspbee] debug:> "bri": 0, 22:57:54.440 [pimatic-raspbee] debug:> "lift": 0, 22:57:54.440 [pimatic-raspbee] debug:> "on": false, 22:57:54.440 [pimatic-raspbee] debug:> "open": true, 22:57:54.440 [pimatic-raspbee] debug:> "reachable": true 22:57:54.440 [pimatic-raspbee] debug:> }, 22:57:54.440 [pimatic-raspbee] debug:> "uniqueid": "ec:1b:bd:ff:fe:8f:10:92-01" 22:57:54.440 [pimatic-raspbee] debug:>} 22:58:02.535 [pimatic-raspbee] debug: ChangeStateTo close 22:58:02.542 [pimatic-raspbee] debug: moveTo: 100, target: 0, _transitSeconds: 5, _positionStep: -20 22:58:02.544 [pimatic-raspbee] debug: updatePosition: 60 22:58:02.545 [pimatic-raspbee] debug: changeActionTo, @_sendState: { 22:58:02.545 [pimatic-raspbee] debug:> "lift": 100 22:58:02.545 [pimatic-raspbee] debug:>} 22:58:02.558 [pimatic-raspbee] debug: Position: 80 22:58:02.597 [pimatic-raspbee] debug: New value send to device WindowCov01 22:58:02.601 [pimatic-raspbee] debug: { lift: 100 } 22:58:03.563 [pimatic-raspbee] debug: updatePosition: 40 22:58:03.566 [pimatic-raspbee] debug: Position: 60 22:58:04.573 [pimatic-raspbee] debug: updatePosition: 20 22:58:04.579 [pimatic-raspbee] debug: Position: 40 22:58:05.586 [pimatic-raspbee] debug: updatePosition: 0 22:58:05.589 [pimatic-raspbee] debug: Position: 20 22:58:06.595 [pimatic-raspbee] debug: updatePosition: -20 22:58:06.598 [pimatic-raspbee] debug: Position: 0 22:58:07.602 [pimatic-raspbee] debug: stopCover, @_sendState: { 22:58:07.602 [pimatic-raspbee] debug:> "lift": 50 22:58:07.602 [pimatic-raspbee] debug:>} 22:58:07.628 [pimatic-raspbee] debug: New value send to device WindowCov01 22:58:07.631 [pimatic-raspbee] debug: { lift: 50 } 22:58:18.801 [pimatic-raspbee] debug: new message received 22:58:18.805 [pimatic-raspbee] debug: { attr: 22:58:18.805 [pimatic-raspbee] debug:> { id: '1', 22:58:18.805 [pimatic-raspbee] debug:> lastannounced: null, 22:58:18.805 [pimatic-raspbee] debug:> lastseen: '2021-02-16T21:58Z', 22:58:18.805 [pimatic-raspbee] debug:> manufacturername: 'dresden elektronik', 22:58:18.805 [pimatic-raspbee] debug:> modelid: 'ConBee II', 22:58:18.805 [pimatic-raspbee] debug:> name: 'Configuration tool 1', 22:58:18.805 [pimatic-raspbee] debug:> swversion: null, 22:58:18.805 [pimatic-raspbee] debug:> type: 'Configuration tool', 22:58:18.805 [pimatic-raspbee] debug:> uniqueid: '00:21:2e:ff:ff:06:15:e6-01' }, 22:58:18.805 [pimatic-raspbee] debug:> e: 'changed', 22:58:18.805 [pimatic-raspbee] debug:> id: '1', 22:58:18.805 [pimatic-raspbee] debug:> r: 'lights', 22:58:18.805 [pimatic-raspbee] debug:> t: 'event', 22:58:18.805 [pimatic-raspbee] debug:> uniqueid: '00:21:2e:ff:ff:06:15:e6-01' } `` -
This is what I tried to explain earlier.
In your scenario in the first round it was switched to ‘open’, but when reaching the 100%, it was switched to ‘close’.
Thus having it connected to a real shutter-motor, it would directly close again … Here it should be switched to ‘stop’As it was now already on ‘close’ in the second round nothing happened
But testing it again now, firstly pressing on ‘stop’ manually (at the device), the second round switched it to close, but in the end nothing happend, where it might should have been switched to ‘close’And as said, using the ‘stop’ button in the gui, switches the device to ‘close’ and not to ‘stop’.
This thing has a real cruical behaviour I fear …
-
Would you like to do another test or may we stop for today?
-
@bertreb said in Release pimatic-raspbee@0.1.6:
a lift=50% command (=stop) was sent.
Yes a saw that and that’s what I meant by it’s cruical behaviour.
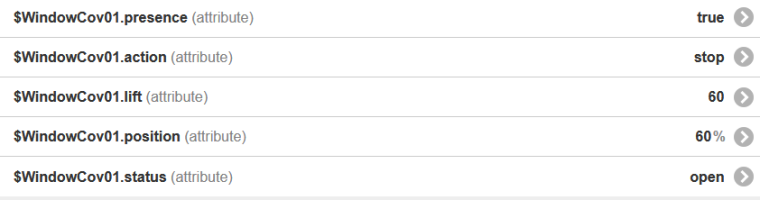
Might the variables help, which have been coming in when configuring the device. There is an ‘action’ and a ‘status’
-
We may check the config in the deconz-gui…?
But have a good night for now …
-
As pre-read maybe take the screenshoots I put on GitHub, I already mentioned earlier:
https://github.com/dresden-elektronik/deconz-rest-plugin/issues/2999
I hope I can come here this evening, as I will have to tackle some other stuff this evening… -
I checked the above info in the closed #2999 issue.
As is stated the SM-SW1-1-ZC should be supported from Deconz version 2.05.79.
The commands that are described are the commands I used initially, and they are conform the Deconz api for cover devices.Because that didn’t work and ‘50 % lift’ = ‘stop’ command, it looks like the shutter isn’t supported the right way in Deconz. The translation of the cover deconz api commands to the specific zigbee commands for the SM-SW1-1-ZC should be done in Deconz!
@Pedder what is your analysis on this?
-
Hi again
")
… sorry but the behavior now I cannot describe. Seems to be kind of chaotic")
Also the slide seems doing crazy things, moving him from the ‘stop’ position, which is now 45% to 100%, makes the percentages counting down, but the device is pushed to ‘up’.
But the general problem pressing ‘stop’ in the gui makes the switch device go to ‘down/close’ is still there.I quickly also checked the Deconz version, which is nto the newest, but still 2.05.86
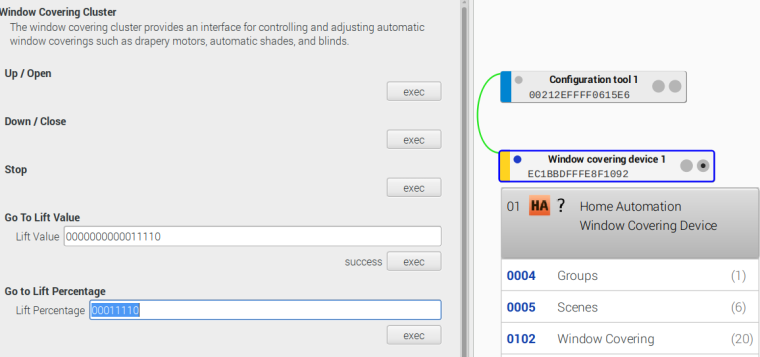
I will open now the deconz-gui and check if the steering of the device works from there. I guess that already worked in the past.
-
Well OK, that seems working, but maybe also not 100%.
Using the Up/Down/Stop buttons in the gui, toggel the correct button on the device.
But putting e. g. in (16bit int) into ‘Go To Lift Value’ seems doing nothing with the device, allthough when pressing ‘exec’ it first says ‘executing’ and then ‘success’ directly besides the button.
I also checked that with the other ‘go To …’ options, which results in the same: silence